Scientific Club Walking Machine
🔗 Links:
Introduction:
-
Brief Overview:
I was responsible for managing the software development team and extensively worked on the URDF (Unified Robot Description Format) and the simulation of the robot in the Gazebo environment. My contributions also included developing software for SLAM, navigation, and motion planning for humanoid robots within ROS environments.

Key Details:
- Skills Demonstrated:
-
Technical Skills:
pythonpath_findinglinuxgitgithubnetworkROSsolderingautonomous_agentCppCOpenCVSLAMarm_trajectories_calculationsomniwheel_controllerURDFGazebo_simulatorpoint_cloud_visionlidarroboticsvoice_to_textsoftware_patterndocumentationmobile_roboticsautonomous_roboticsNLPcomputer_visionnavigationmecanum_wheels
-
Soft Skills:
researchteamworkleadershiporganizationiterative_designin_the_field_repairworking_under_pressurecommunication_with_investor
-
Project story in picture:
When I first arrived in the club, it was empty. Almost everybody had graduated. We were left with a pile of metal and a CAD of SARA.
Pieces by pieces, we received, printed, assembled the body parts…

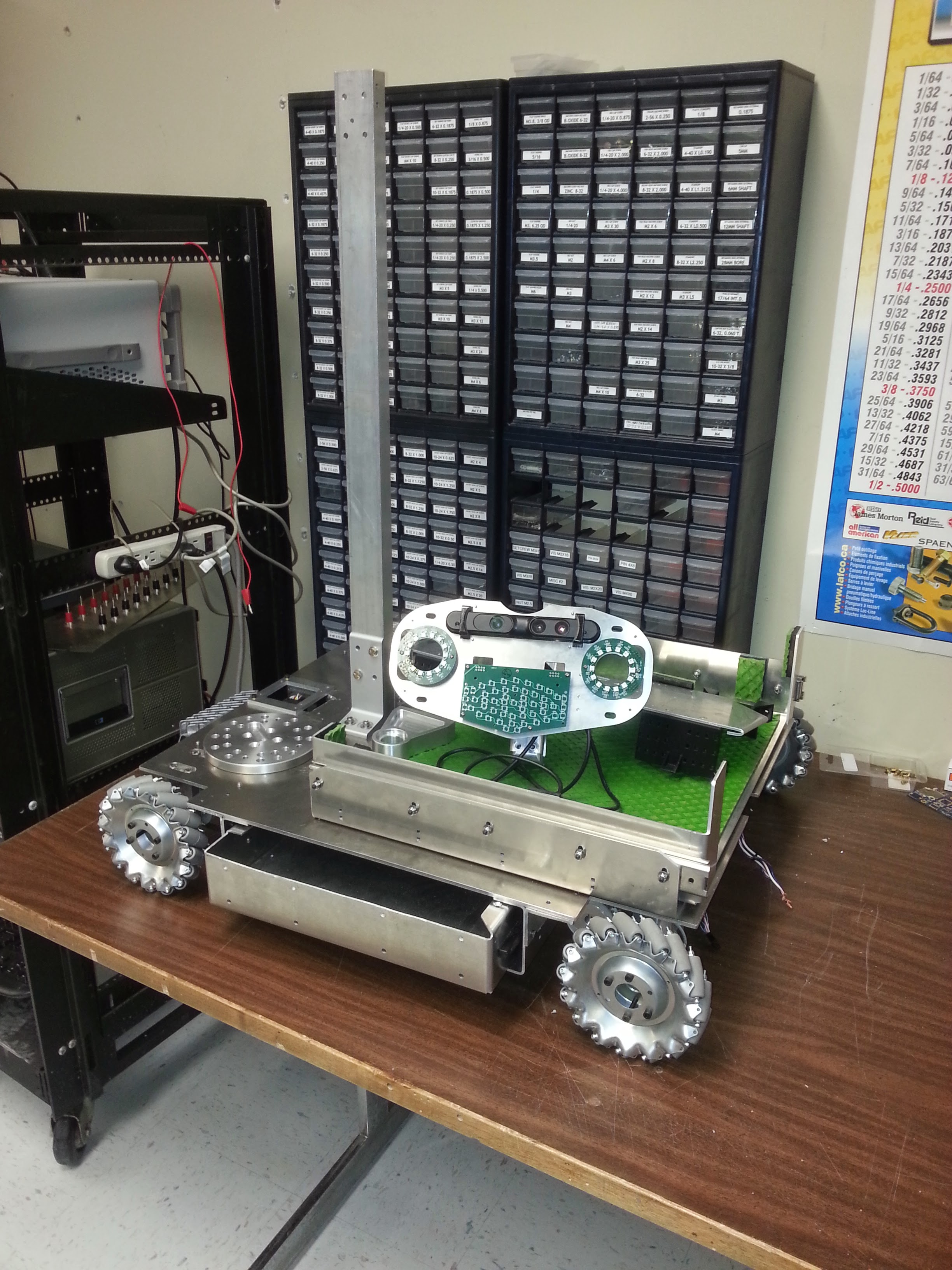
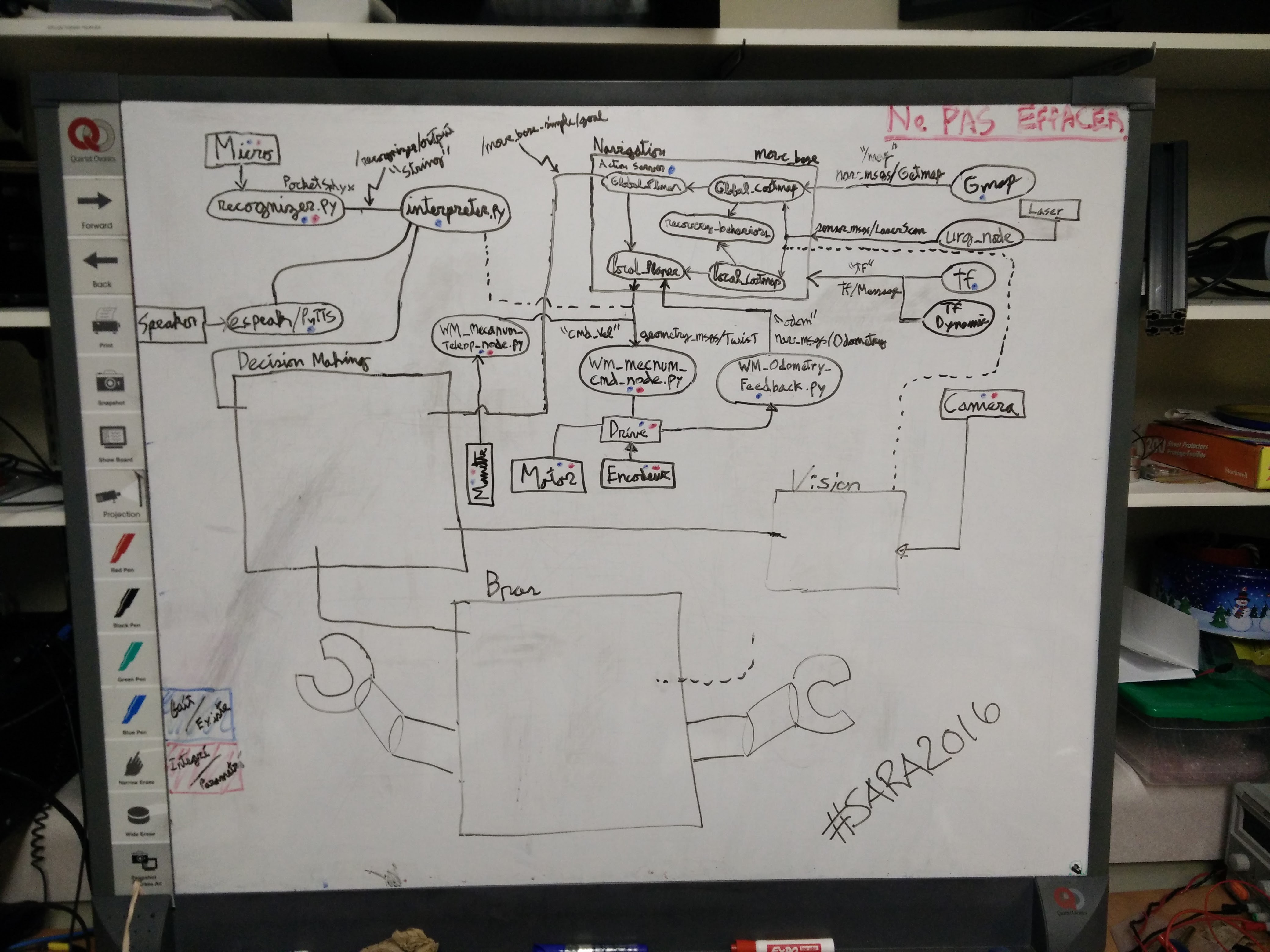
I then started studying ROS, and building from scratch a codebase for SARA…
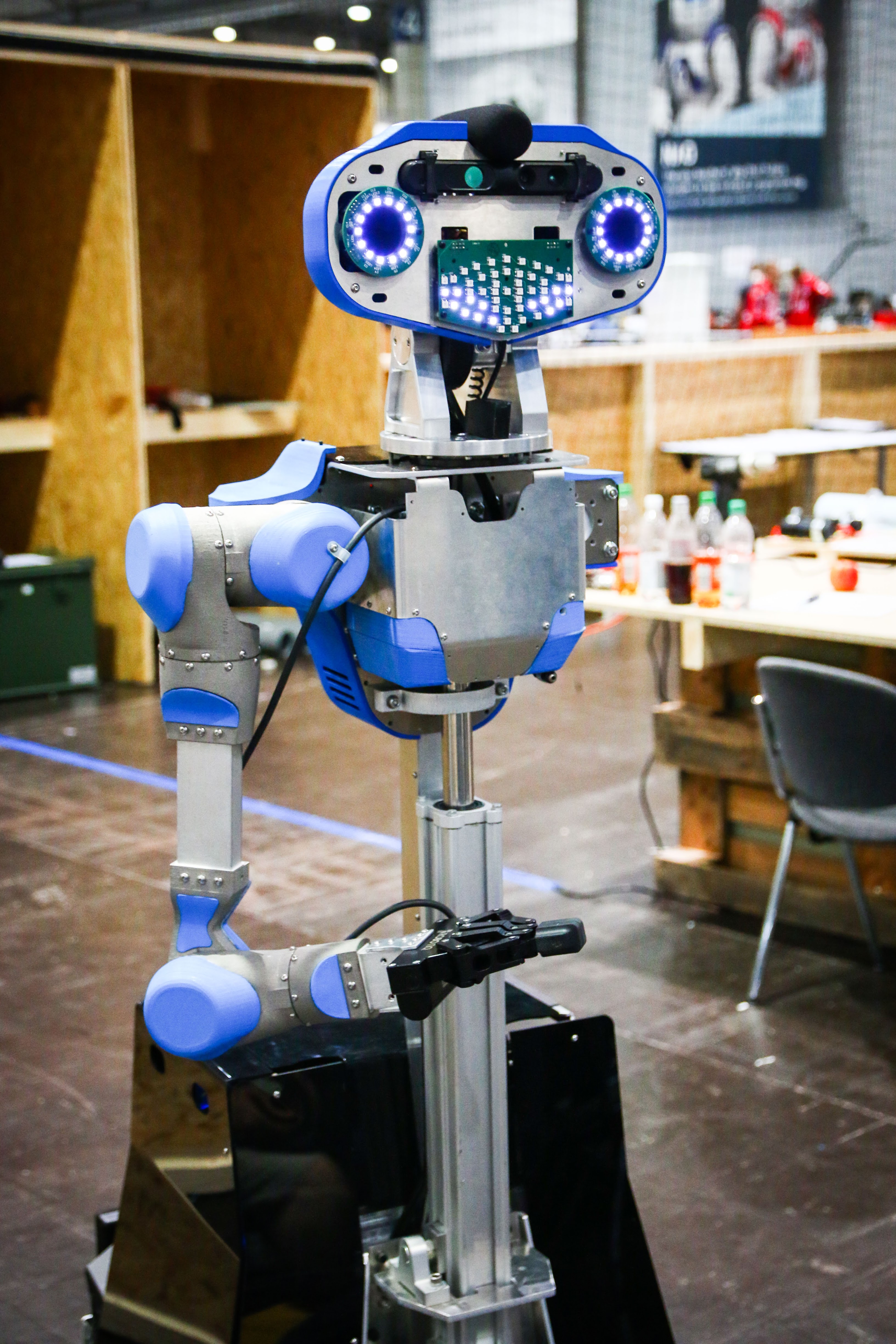
The body was starting to take form, but still, no computer on board…

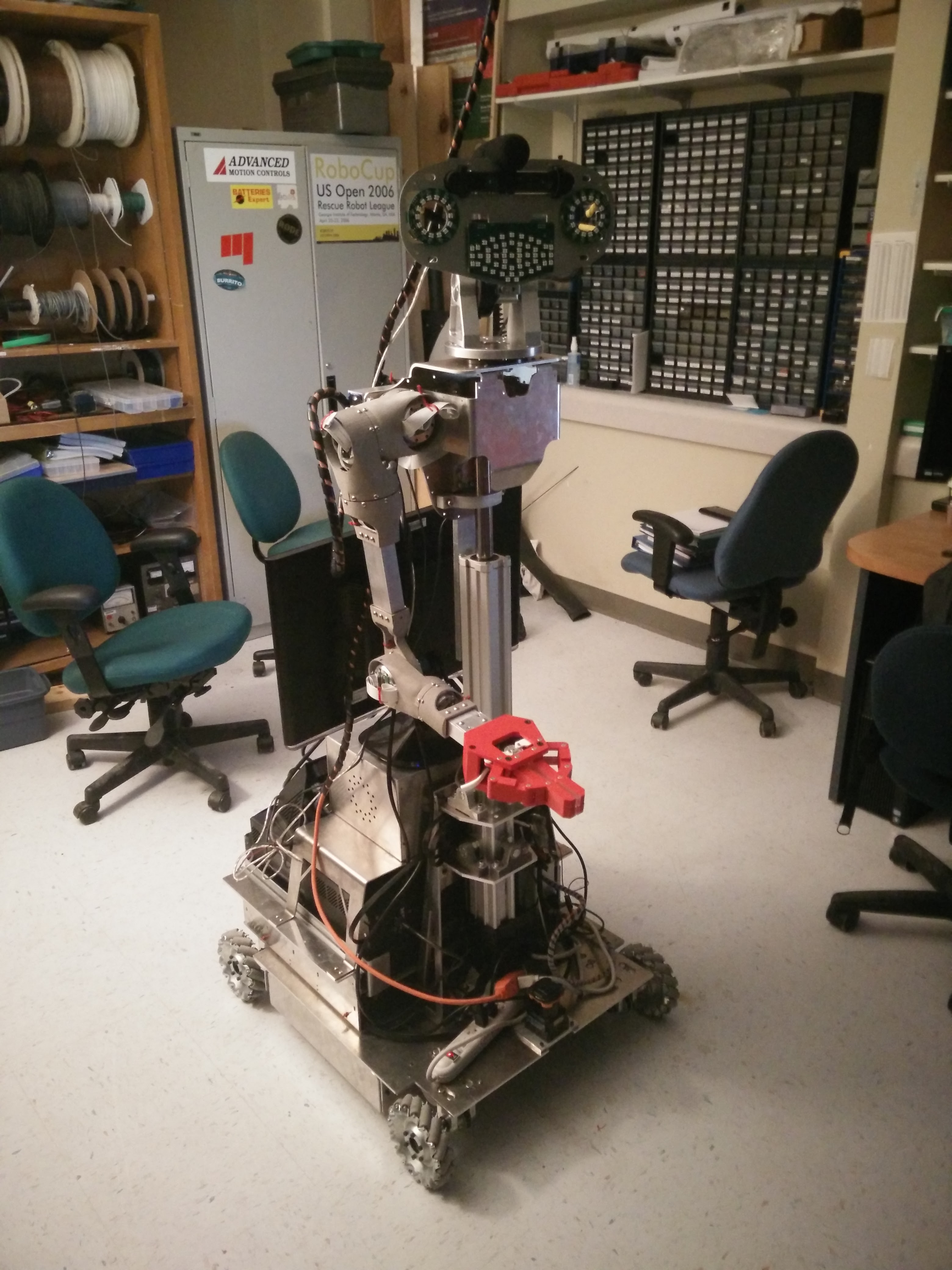
After many, many, many nights without much sleep, we had a tethered mobile robot able to to move its arm! 🎉
Showcasing SARA to the high school near to inspire future engineers

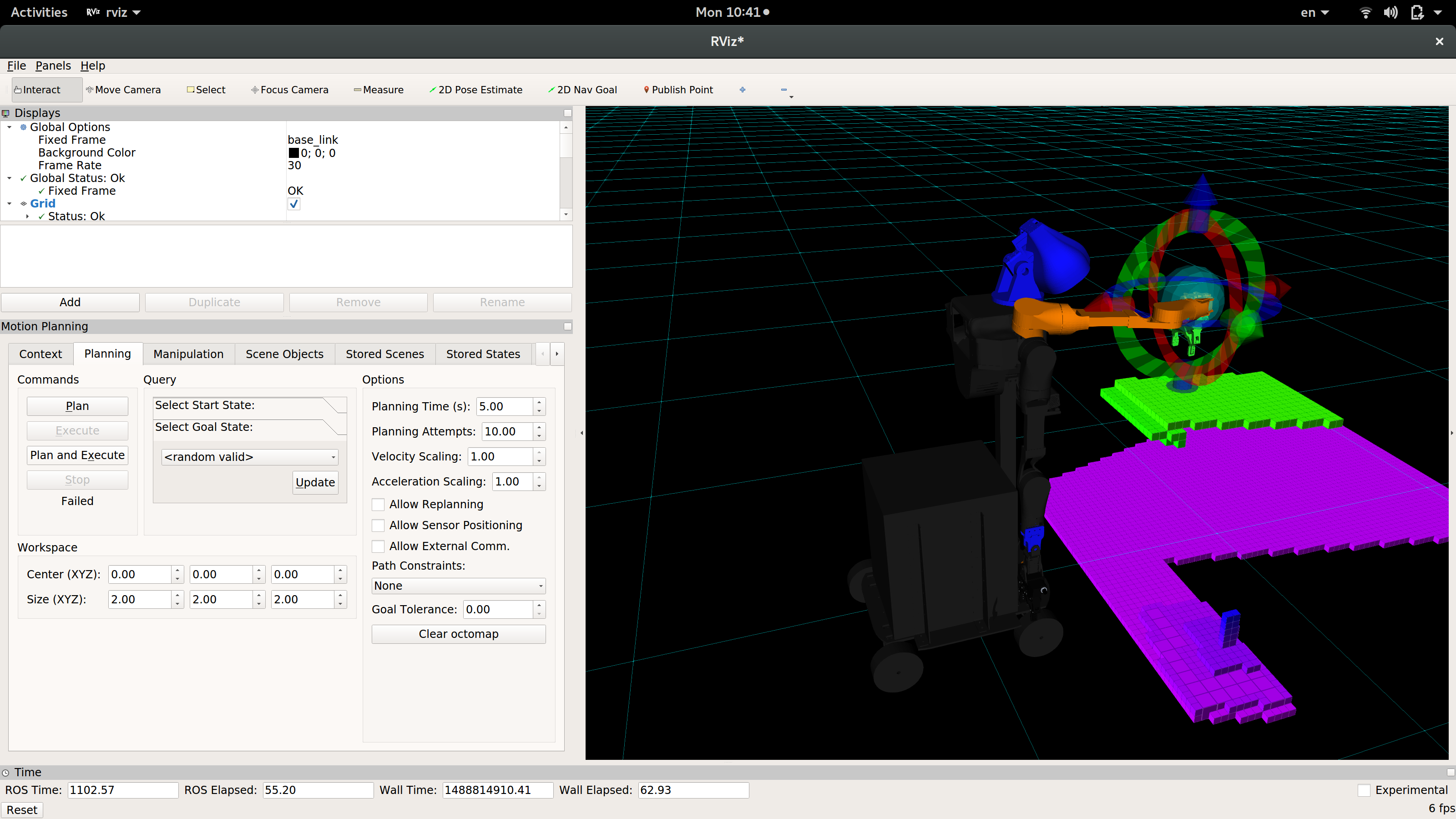
During SARA construction, us, the software team, were already incorporating the CADs into a URDF to begin to simulate the skills and behavior of SARA.

After been able to navigate effectively the environment, we quickly started trying to grasp objects.
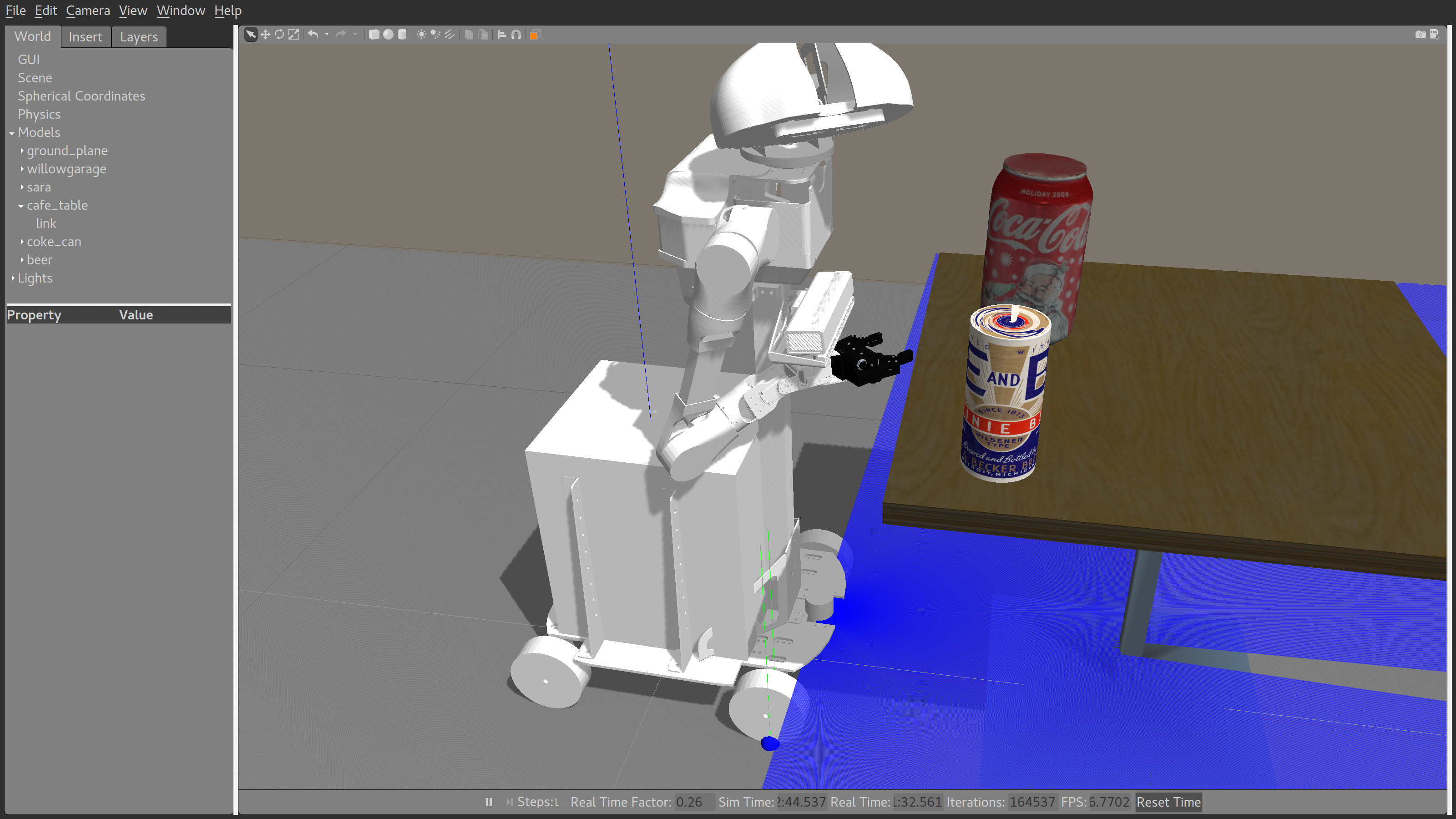
By incorporating the point cloud from our 3D camera, we were able to give SARA voxel vision. This allowed her to move her arm without hitting the table
When her body was completed, it was time to practice in the real world!

My team and I brought SARA to the RoboCup@Home 2016 in Germany and…
…and 2017 in Japan! Then it was time for me to say goodbye to SARA and hello to Naova to participate to the RoboCup SPL 2018 and 2019!
